Angular Frequency and Period
Understanding Oscillation Timing
When an object undergoes simple harmonic motion (SHM), it repeats its motion in a regular cycle. We quantify this timing using three related values:
- Angular Frequency \( \omega \): How fast the object oscillates in radians per second.
- Frequency \( f \): How many full cycles it completes per second (measured in hertz, Hz).
- Period \( T \): How long it takes to complete one full cycle (measured in seconds).
Mass-Spring Systems
For both horizontal and vertical spring systems (assuming no damping and friction), the motion follows Hooke’s Law: \( F = -kx \). This produces SHM when the mass is displaced from equilibrium.
Formulas for a Mass-Spring System
- \( k \): Spring constant (N/m) - \( m \): Mass (kg) - These equations apply to **horizontal** spring systems directly. - For **vertical springs**, the equilibrium position shifts due to gravity, but the formulas remain the same for small oscillations.
Simple Pendulum
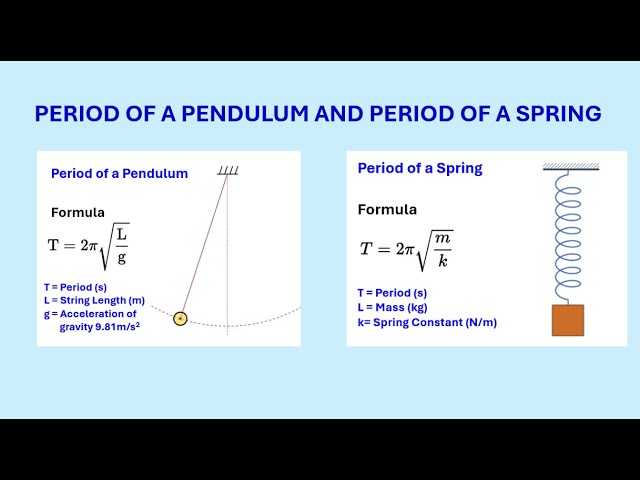
A simple pendulum consists of a mass suspended from a light, inextensible string. When displaced slightly from equilibrium, it undergoes SHM due to the restoring force of gravity.
Formulas for a Simple Pendulum
- \( g \): Acceleration due to gravity (≈ 9.8 m/s²) - \( L \): Length of the pendulum (from pivot to center of mass) - These equations are valid only for **small angles** (typically \( \theta < 15^\circ \)) where the restoring force is proportional to displacement.
Which Variables Affect the Period?
- Increasing mass in a spring system slows down the oscillation (larger \( T \)).
- Increasing spring stiffness (larger \( k \)) makes the motion faster (smaller \( T \)).
- For pendulums, longer strings increase the period (slower swing).
- The mass of the pendulum bob does not affect the period at all!
Key Takeaway
All of these systems obey the same basic differential equation:
This equation guarantees that the system’s motion is sinusoidal, with angular frequency \( \omega \) determined by system parameters like mass, spring constant, or pendulum length.